General architecture
The new ROOT geometry package is a tool designed for building, browsing,
tracking and visualizing a detector geometry. The code is independent from
other external MC for simulation, therefore it does not contain any
constraints related to physics. However, the package defines a number of
hooks for tracking, such as media, materials, magnetic field or track state flags,
in order to allow interfacing to tracking MC's. The final goal is to be
able to use the same geometry for several purposes, such as tracking,
reconstruction or visualization, taking advantage of the ROOT features
related to bookkeeping, I/O, histograming, browsing and GUI's.
The geometrical modeler is the most important component of the package and
it provides answers to the basic questions like "Where am I ?" or "How far
from the next boundary ?", but also to more complex ones like "How far from
the closest surface ?" or "Which is the next crossing along a helix ?".
The architecture of the modeler is a combination between a GEANT-like
containment scheme and a normal CSG binary tree at the level of shapes. An
important common feature of all detector geometry descriptions is the
mother-daughter concept. This is the most natural approach when tracking
is concerned and imposes a set of constraints to the way geometry is defined.
Constructive solid geometry composition is used only in order to create more
complex shapes from an existing set of primitives through boolean operations.
This feature is not implemented yet but in future full definition of boolean
expressions will be supported.
Practically every geometry defined in GEANT style can be mapped by the modeler.
The basic components used for building the logical hierarchy of the geometry
are called "volumes" and "nodes". Volumes (sometimes called "solids") are fully
defined geometrical objects having a given shape and medium and possibly
containing a list of nodes. Nodes represent just positioned instances of volumes
inside a container volume and they are not directly defined by user. They are
automatically created as a result of adding one volume inside other or dividing
a volume. The geometrical transformation hold by nodes is always defined with
respect to their mother (relative positioning). Reflection matrices are allowed.
All volumes have to be fully aware of their containees when the geometry is
closed. They will build aditional structures (voxels) in order to fasten-up
the search algorithms. Finally, nodes can be regarded as bidirectional links
between containers and containees objects.
The structure defined in this way is a graph structure since volumes are
replicable (same volume can become daughter node of several other volumes),
every volume becoming a branch in this graph. Any volume in the logical graph
can become the actual top volume at run time (see TGeoManager::SetTopVolume()).
All functionalities of the modeler will behave in this case as if only the
corresponding branch starting from this volume is the registered geometry.
/*

*/
A given volume can be positioned several times in the geometry. A volume
can be divided according default or user-defined patterns, creating automatically
the list of division nodes inside. The elementary volumes created during the
dividing process follow the same scheme as usual volumes, therefore it is possible
to position further geometrical structures inside or to divide them further more
(see TGeoVolume::Divide()).
The primitive shapes supported by the package are basically the GEANT3
shapes (see class TGeoShape), arbitrary wedges with eight vertices on two parallel
planes. All basic primitives inherits from class TGeoBBox since the bounding box
of a solid is essential for the tracking algorithms. They also implement the
virtual methods defined in the virtual class TGeoShape (point and segment
classification). User-defined primitives can be direcly plugged into the modeler
provided that they override these methods. Composite shapes will be soon supported
by the modeler. In order to build a TGeoCompositeShape, one will have to define
first the primitive components. The object that handle boolean
operations among components is called TGeoBoolCombinator and it has to be
constructed providing a string boolean expression between the components names.
Example for building a simple geometry :
void rootgeom()
{
--- Definition of a simple geometry
gSystem->Load("libGeom");
TGeoManager *geom = new TGeoManager("simple1", "Simple geometry");
//--- define some materials
TGeoMaterial *matVacuum = new TGeoMaterial("Vacuum", 0,0,0);
TGeoMaterial *matAl = new TGeoMaterial("Al", 26.98,13,2.7);
//--- define some media
TGeoMedium *med;
TGeoMedium *Vacuum = new TGeoMedium(1, matVacuum);
TGeoMedium *Al = new TGeoMedium(2, matAl);
//--- define the transformations
TGeoTranslation *tr1 = new TGeoTranslation(20., 0, 0.);
TGeoTranslation *tr2 = new TGeoTranslation(10., 0., 0.);
TGeoTranslation *tr3 = new TGeoTranslation(10., 20., 0.);
TGeoTranslation *tr4 = new TGeoTranslation(5., 10., 0.);
TGeoTranslation *tr5 = new TGeoTranslation(20., 0., 0.);
TGeoTranslation *tr6 = new TGeoTranslation(-5., 0., 0.);
TGeoTranslation *tr7 = new TGeoTranslation(7.5, 7.5, 0.);
TGeoRotation *rot1 = new TGeoRotation("rot1", 90., 0., 90., 270., 0., 0.);
TGeoCombiTrans *combi1 = new TGeoCombiTrans(7.5, -7.5, 0., rot1);
TGeoTranslation *tr8 = new TGeoTranslation(7.5, -5., 0.);
TGeoTranslation *tr9 = new TGeoTranslation(7.5, 20., 0.);
TGeoTranslation *tr10 = new TGeoTranslation(85., 0., 0.);
TGeoTranslation *tr11 = new TGeoTranslation(35., 0., 0.);
TGeoTranslation *tr12 = new TGeoTranslation(-15., 0., 0.);
TGeoTranslation *tr13 = new TGeoTranslation(-65., 0., 0.);
TGeoTranslation *tr14 = new TGeoTranslation(0,0,-100);
TGeoCombiTrans *combi2 = new TGeoCombiTrans(0,0,100,
new TGeoRotation("rot2",90,180,90,90,180,0));
TGeoCombiTrans *combi3 = new TGeoCombiTrans(100,0,0,
new TGeoRotation("rot3",90,270,0,0,90,180));
TGeoCombiTrans *combi4 = new TGeoCombiTrans(-100,0,0,
new TGeoRotation("rot4",90,90,0,0,90,0));
TGeoCombiTrans *combi5 = new TGeoCombiTrans(0,100,0,
new TGeoRotation("rot5",0,0,90,180,90,270));
TGeoCombiTrans *combi6 = new TGeoCombiTrans(0,-100,0,
new TGeoRotation("rot6",180,0,90,180,90,90));
//--- make the top container volume
Double_t worldx = 110.;
Double_t worldy = 50.;
Double_t worldz = 5.;
TGeoVolume *top = geom->MakeBox("TOP", Vacuum, 270., 270., 120.);
geom->SetTopVolume(top); // mandatory !
//--- build other container volumes
TGeoVolume *replica = geom->MakeBox("REPLICA", Vacuum,120,120,120);
replica->SetVisibility(kFALSE);
TGeoVolume *rootbox = geom->MakeBox("ROOT", Vacuum, 110., 50., 5.);
rootbox->SetVisibility(kFALSE); // this will hold word 'ROOT'
//--- make letter 'R'
TGeoVolume *R = geom->MakeBox("R", Vacuum, 25., 25., 5.);
R->SetVisibility(kFALSE);
TGeoVolume *bar1 = geom->MakeBox("bar1", Al, 5., 25, 5.);
bar1->SetLineColor(kRed);
R->AddNode(bar1, 1, tr1);
TGeoVolume *bar2 = geom->MakeBox("bar2", Al, 5., 5., 5.);
bar2->SetLineColor(kRed);
R->AddNode(bar2, 1, tr2);
R->AddNode(bar2, 2, tr3);
TGeoVolume *tub1 = geom->MakeTubs("tub1", Al, 5., 15., 5., 90., 270.);
tub1->SetLineColor(kRed);
R->AddNode(tub1, 1, tr4);
TGeoVolume *bar3 = geom->MakeArb8("bar3", Al, 5.);
bar3->SetLineColor(kRed);
TGeoArb8 *arb = (TGeoArb8*)bar3->GetShape();
arb->SetVertex(0, 15., -5.);
arb->SetVertex(1, 5., -5.);
arb->SetVertex(2, -10., -25.);
arb->SetVertex(3, 0., -25.);
arb->SetVertex(4, 15., -5.);
arb->SetVertex(5, 5., -5.);
arb->SetVertex(6, -10., -25.);
arb->SetVertex(7, 0., -25.);
R->AddNode(bar3, 1, gGeoIdentity);
//--- make letter 'O'
TGeoVolume *O = geom->MakeBox("O", Vacuum, 25., 25., 5.);
O->SetVisibility(kFALSE);
TGeoVolume *bar4 = geom->MakeBox("bar4", Al, 5., 7.5, 5.);
bar4->SetLineColor(kYellow);
O->AddNode(bar4, 1, tr5);
O->AddNode(bar4, 2, tr6);
TGeoVolume *tub2 = geom->MakeTubs("tub1", Al, 7.5, 17.5, 5., 0., 180.);
tub2->SetLineColor(kYellow);
O->AddNode(tub2, 1, tr7);
O->AddNode(tub2, 2, combi1);
//--- make letter 'T'
TGeoVolume *T = geom->MakeBox("T", Vacuum, 25., 25., 5.);
T->SetVisibility(kFALSE);
TGeoVolume *bar5 = geom->MakeBox("bar5", Al, 5., 20., 5.);
bar5->SetLineColor(kBlue);
T->AddNode(bar5, 1, tr8);
TGeoVolume *bar6 = geom->MakeBox("bar6", Al, 17.5, 5., 5.);
bar6->SetLineColor(kBlue);
T->AddNode(bar6, 1, tr9);
//--- add letters to 'ROOT' container
rootbox->AddNode(R, 1, tr10);
rootbox->AddNode(O, 1, tr11);
rootbox->AddNode(O, 2, tr12);
rootbox->AddNode(T, 1, tr13);
//--- add word 'ROOT' on each face of a cube
replica->AddNode(rootbox, 1, tr14);
replica->AddNode(rootbox, 2, combi2);
replica->AddNode(rootbox, 3, combi3);
replica->AddNode(rootbox, 4, combi4);
replica->AddNode(rootbox, 5, combi5);
replica->AddNode(rootbox, 6, combi6);
//--- add four replicas of this cube to top volume
top->AddNode(replica, 1, new TGeoTranslation(-150, -150, 0));
top->AddNode(replica, 2, new TGeoTranslation(150, -150, 0));
top->AddNode(replica, 3, new TGeoTranslation(150, 150, 0));
top->AddNode(replica, 4, new TGeoTranslation(-150, 150, 0));
//--- close the geometry
geom->CloseGeometry();
//--- draw the ROOT box
geom->SetVisLevel(4);
top->Draw();
if (gPad) gPad->x3d();
}
/*
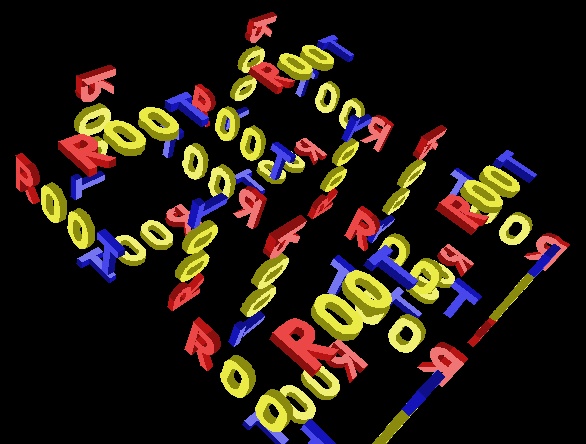
*/
TGeoManager - the manager class for the geometry package.
TGeoManager class is embedding all the API needed for building and tracking
a geometry. It defines a global pointer (gGeoManager) in order to be fully
accessible from external code. The mechanism of handling multiple geometries
at the same time will be soon implemented.
TGeoManager is the owner of all geometry objects defined in a session,
therefore users must not try to control their deletion. It contains lists of
media, materials, transformations, shapes and volumes. Logical nodes (positioned
volumes) are created and destroyed by the TGeoVolume class. Physical
nodes and their global transformations are subjected to a caching mechanism
due to the sometimes very large memory requirements of logical graph expansion.
The caching mechanism is triggered by the total number of physical instances
of volumes and the cache manager is a client of TGeoManager. The manager class
also controls the painter client. This is linked with ROOT graphical libraries
loaded on demand in order to control visualization actions.
Rules for building a valid geometry
A given geometry can be built in various ways, but there are mandatory steps
that have to be followed in order to be validated by the modeler. There are
general rules : volumes needs media and shapes in order to be created,
both container an containee volumes must be created before linking them together,
and the relative transformation matrix must be provided. All branches must
have an upper link point otherwise they will not be considered as part of the
geometry. Visibility or tracking properties of volumes can be provided both
at build time or after geometry is closed, but global visualization settings
(see TGeoPainter class) should not be provided at build time, otherwise the
drawing package will be loaded. There is also a list of specific rules :
positioned daughters should not extrude their mother or intersect with sisters
unless this is specified (see TGeoVolume::AddNodeOverlap()), the top volume
(containing all geometry tree) must be specified before closing the geometry
and must not be positioned - it represents the global reference frame. After
building the full geometry tree, the geometry must be closed
(see TGeoManager::CloseGeometry()). Voxelization can be redone per volume after
this process.
Below is the general scheme of the manager class.
/*

*/
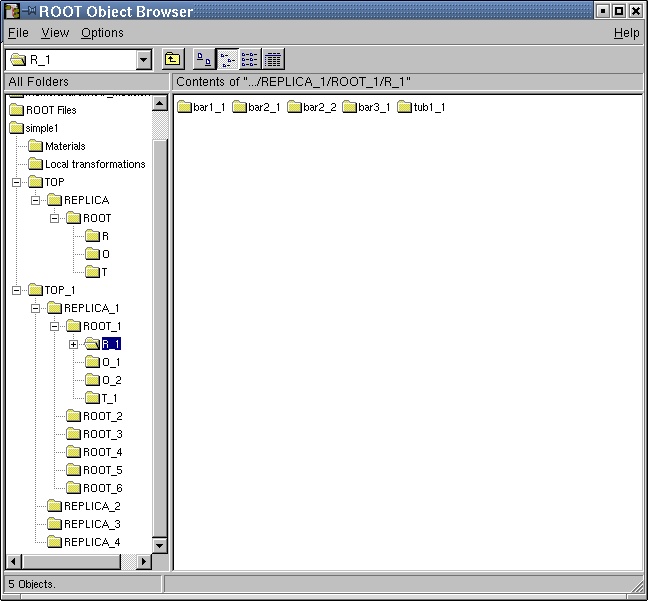
An interactive session
Provided that a geometry was successfully built and closed (for instance the
previous example $ROOTSYS/tutorials/geom/rootgeom.C ), the manager class will register
itself to ROOT and the logical/physical structures will become immediately browsable.
The ROOT browser will display starting from the geometry folder : the list of
transformations and media, the top volume and the top logical node. These last
two can be fully expanded, any intermediate volume/node in the browser being subject
of direct access context menu operations (right mouse button click). All user
utilities of classes TGeoManager, TGeoVolume and TGeoNode can be called via the
context menu.
/*
*/
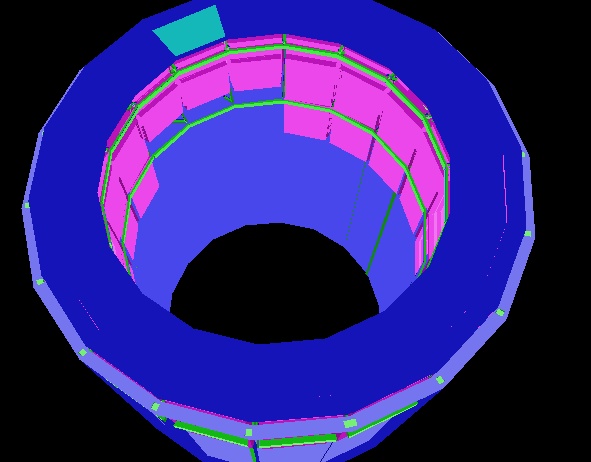
--- Drawing the geometry
Any logical volume can be drawn via TGeoVolume::Draw() member function.
This can be direcly accessed from the context menu of the volume object
directly from the browser.
There are several drawing options that can be set with
TGeoManager::SetVisOption(Int_t opt) method :
opt=0 - only the content of the volume is drawn, N levels down (default N=3).
This is the default behavior. The number of levels to be drawn can be changed
via TGeoManager::SetVisLevel(Int_t level) method.
/*
*/
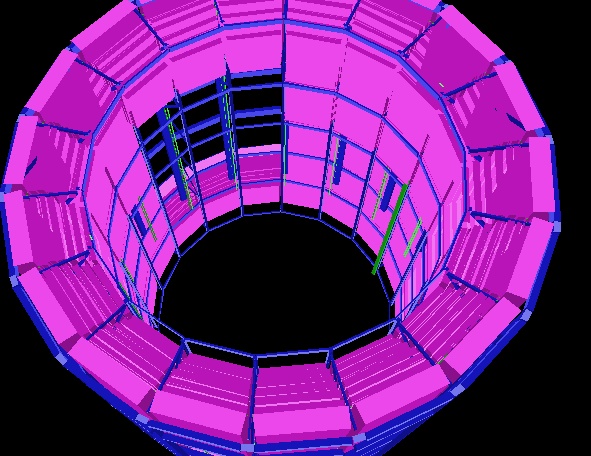
opt=1 - the final leaves (e.g. daughters with no containment) of the branch
starting from volume are drawn down to the current number of levels.
WARNING : This mode is memory consuming
depending of the size of geometry, so drawing from top level within this mode
should be handled with care for expensive geometries. In future there will be
a limitation on the maximum number of nodes to be visualized.
/*
*/
opt=2 - only the clicked volume is visualized. This is automatically set by
TGeoVolume::DrawOnly() method
opt=3 - only a given path is visualized. This is automatically set by
TGeoVolume::DrawPath(const char *path) method
The current view can be exploded in cartesian, cylindrical or spherical
coordinates :
TGeoManager::SetExplodedView(Int_t opt). Options may be :
- 0 - default (no bombing)
- 1 - cartesian coordinates. The bomb factor on each axis can be set with
TGeoManager::SetBombX(Double_t bomb) and corresponding Y and Z.
- 2 - bomb in cylindrical coordinates. Only the bomb factors on Z and R
are considered
/*
*/
- 3 - bomb in radial spherical coordinate : TGeoManager::SetBombR()
Volumes themselves support different visualization settings :
- TGeoVolume::SetVisibility() : set volume visibility.
- TGeoVolume::VisibleDaughters() : set daughters visibility.
All these actions automatically updates the current view if any.
--- Checking the geometry
Several checking methods are accessible from the volume context menu. They
generally apply only to the visible parts of the drawn geometry in order to
ease geometry checking, and their implementation is in the TGeoChecker class
from the painting package.
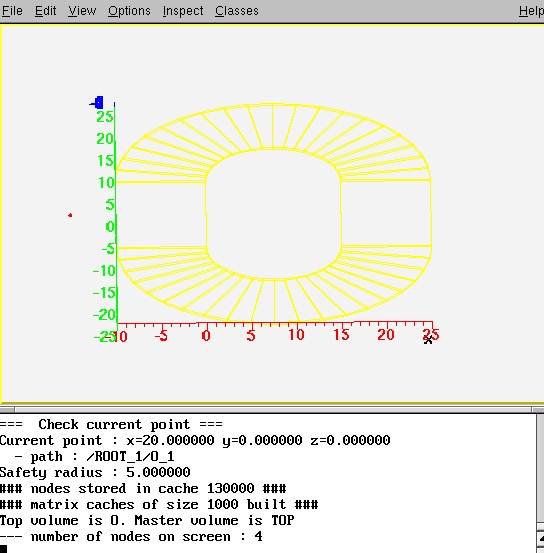
1. Checking a given point.
Can be called from TGeoManager::CheckPoint(Double_t x, Double_t y, Double_t z).
This method is drawing the daughters of the volume containing the point one
level down, printing the path to the deepest physical node holding this point.
It also computes the closest distance to any boundary. The point will be drawn
in red.
/*
*/
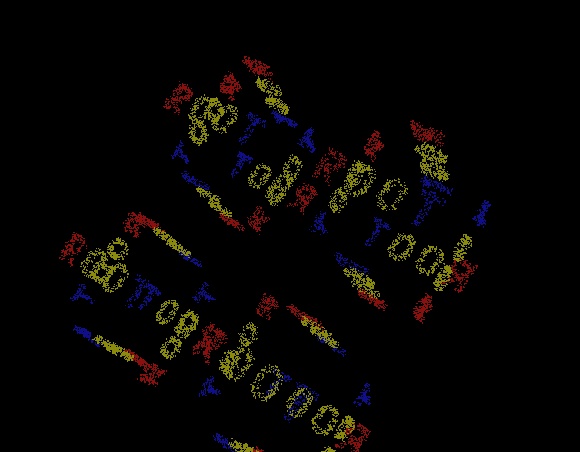
2. Shooting random points.
Can be called from TGeoVolume::RandomPoints() (context menu function) and
it will draw this volume with current visualization settings. Random points
are generated in the bounding box of the top drawn volume. The points are
classified and drawn with the color of their deepest container. Only points
in visible nodes will be drawn.
/*
*/
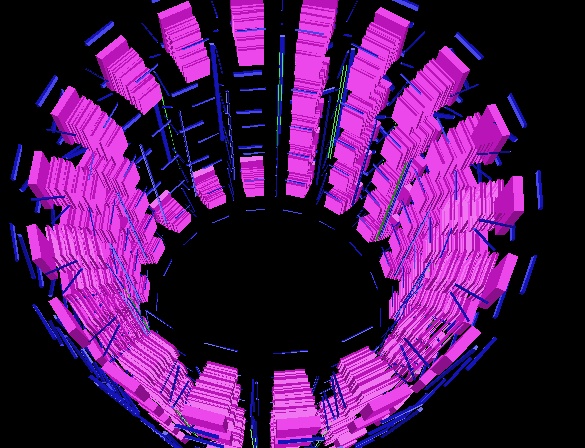
3. Raytracing.
Can be called from TGeoVolume::RandomRays() (context menu of volumes) and
will shoot rays from a given point in the local reference frame with random
directions. The intersections with displayed nodes will appear as segments
having the color of the touched node. Drawn geometry will be then made invisible
in order to enhance rays.
/*

*/

{kind=link}
{kind=link}
{kind=link}